Blogs

Pastall best seller products list for Raspberry PI and Ardunio
- Refresh your stock with new items.
- Find your next bestseller here!
- Get New Products to Sell.
- Save Your Time and Money.
- 40 PIN GPIO HEADER For Raspberry Pi
.jpg)
- https://www.pastall.com/index.php?route=product/product&path=26&product_id=414
- Raspberry PI ZERO Case

- https://www.pastall.com/index.php?route=product/product&path=26&product_id=422
- Sparkfun BATTERY -850MAH
- https://www.pastall.com/index.php?route=product/product&path=26&product_id=348
- Sparkfun SOLENOID - 5V (SMALL)

- https://www.pastall.com/index.php?route=product/product&path=26&product_id=401
- ARCADE JOYSTICK - SHORT HANDLE

- https://www.pastall.com/index.php?route=product/product&path=26&product_id=304
Micro HDMI to HDMI cable for Raspberry PI

35KG digtal servo -customzied no MOQ

https://www.pastall.com/index.php?route=product/product&path=26&product_id=418
Rapsberry Pi Case for PI 4

https://www.pastall.com/index.php?route=product/product&path=26&product_id=61
Heat Resistant Tape

https://www.pastall.com/index.php?route=product/product&search=tape&product_id=313

New Raspberry PI 4 Armor Case Release
Recently released a new Raspberry Pi Armor Case version to replace the order one, we conducted a test analysis on it, the test results are as follows:
The speed of the fan is 6000rpm,mass flow rate is 1.91CFM.

1. Fluid Simulation
The fan blade adopts NACA airfoil design, combined with ANSYS simulation analysis to optimize air flow and reduce noise.



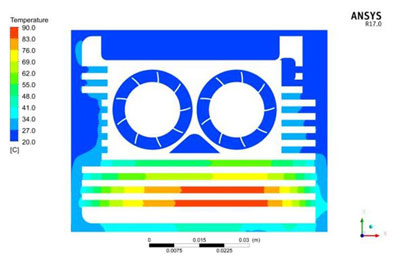
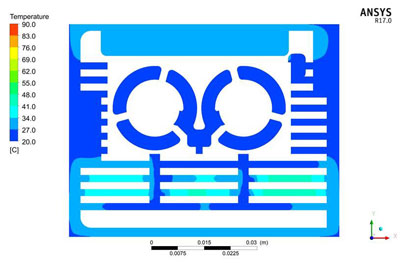
2 Thermal simulation
Optimize the heat sink design, increase the air guide groove, promote air circulation, and combine ANSYS thermal simulation analysis to improve the heat dissipation capacity
Before modification (blue to red, increasing temperature) After modification (temperature decreases significantly)

What's the Digital Servo Signal Wire For?

The receiver or flybarless system “talks” to the servo through this wire by means of a simple on/off pulsed signal. This is known as PWM, Pulse Width Modulation.
The "normal" frequency of this PWM signal is 50 Hz, meaning that 50 times a second, the position of the servo is "updated" or "refreshed". Time wise, that means once about every 20 milliseconds.
This frequency can vary quite a bit between brands and components (most fully compatible), and has no impact on the actual servo position, it only impacts how often that position is updated.
It is however important to understand that some devices (tail gyro's & flybarless units for example as will be demonstrated below), can generate much higher frequency refresh rates (upwards of 560 Hz). If you use such devices, you must make sure your RC servos are rated to handle those higher refresh frequencies. These refresh frequency numbers are generally given in the servo specifications in number of the maximum Hz the servo can operate at safely.
You can always run a fast rated servo at lower refresh frequencies, but you can't run a slow rated servo at fast refresh frequencies.
The actual servo position is determined by the length (pulse width) or "on time" of each of those individual PWM pulses regardless of the refresh frequency. The "nominal" pulse width range is about 1000 to 2000 mirco-seconds (us) with the center position set at about 1500us; however over travel is possible by going outside those numbers by increasing servo travel limits in your radio as one example.
IMPORTANT! Narrow Band RC Helicopter Tail Rotor Servos
You will often see high performance tail rotor specific RC servos that have shorter centering pulse widths (narrow band) to improve their resolution. The shorter the pulse width, the higher the refresh rate can be (again upwards of 560 Hz).
These specialized ultra fast tail rotor specific RC servos will have centering positions listed in the specifications of 760us or 960us. Fast 760us or 960us tail rotor specific RC servos can only be used with tail gyros or FBL systems that support these shorter narrow band centering pulse widths.
If you hook a narrow band 760us center servo up to a 1500us or 1520us output, the servo won't work at all. If you hook a 1500/1520us servo up to a narrow band 760us output, the servo can be damaged because it will overtravel and stall.

What is Digital Servo Parts?
Digital servo has many different saying.Analog, digital, coreless, brushless, linear, rotary, ratings, sizes, frequency, narrow band, PWM, gears, cases, splines,
So many options, so much to understand. As the saying goes, best to start at the beginning.
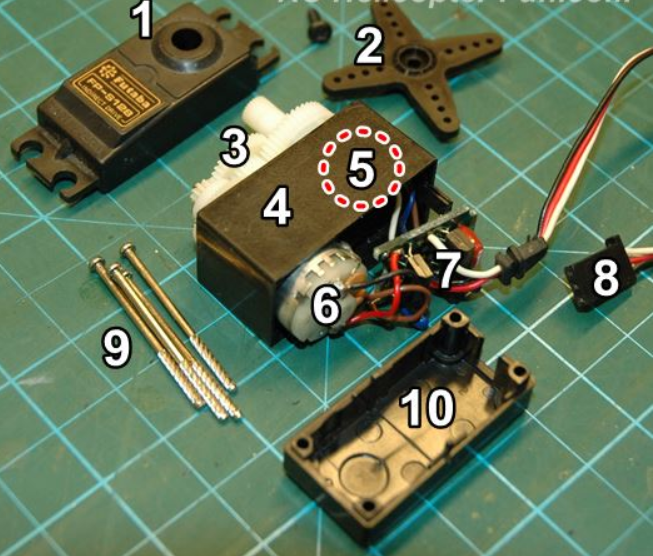
As pictured above, most servos have the same 10 basic parts. There are of course variations on this basic layout, but this is typical of what you'll find:
1-Top Case. 2-Servo Arm/Horn/Wheel. 3-Gear Set. 4-Center Case. 5-Potentiometer (hidden). 6-Motor. 7-Control Board. 8-Servo Plug. 9-Case Screw Set. 10-Bottom Case.
The servo plug has three conductors/wires. One wire supplies positive DC voltage to the servo – usually 5 to 6 volts (HV servos can handle up to 8.5 VDC). The second wire is for servo voltage ground, and the third wire is the servo signal wire.
Raspberry Pi 4: a full desktop replacement?
First tests
I set up my new workstation next to my existing laptop, with two 1080p monitors that only had DVI connectors, so I had to get a couple of £2 adapters and an additional cable to get sound out of the audio jack of my Raspberry Pi. Time for an initial test-drive. Booting up into Raspbian Buster was quick, about ten seconds, and connection to WiFi easy. There’s no doubting the feel of the speed improvements. Yes, I’ve read all the benchmark tests, but I wanted to know how that translates to user experience. This new kit does not disappoint.
Raspbian has matured impressively as an OS. For my daily desktop scenario, the jewel in the crown is Chromium: having such a capable web browser is what makes this whole experiment feasible. Others have upped their game, too: Firefox has come a long way, and many other browsers are now available, such as Vivaldi. A check of some of my most visited sites showed Chromium to be just as capable as Chrome on my regular machine. Unsurprisingly, it wasn’t as snappy and I hit a few bumps, but we’ll get to that.
A day of impressions
I’m no expert when it comes to GPUs, but I was impressed with the dual-monitor support. The setup worked first time and didn’t seem to have any detrimental effect on the machine’s performance. I was expecting slow window drawing or things getting ‘stuck’, but this wasn’t the case.

By the end of the first day, I was getting used to the keyboard and mouse too. They are a nice mixture of being both functional and aesthetically pleasing. The keyboard comes with a three-port hub, so you can connect the mouse if you wish. It does not have the build quality and precision of my daily wireless keyboard and trackpad, but for a fraction of the price, I was surprised how much I got for my money. By the end of the week, I’d grown quite fond of it.

Working from home with your Raspberry Pi
Raspberry Pi 4 is more than powerful enough to serve as replacement desktop computer while you’re working from home. Or as a secondary desktop to help you out while you’re doing other things, such video conferencing, on your main computer.

Raspberry Pi 4 Model B
If you’re pulling your Raspberry Pi out of a drawer right now, you should make sure you update it with the latest version of Raspbian; if it’s been a while since you used this Raspberry Pi, you might even want to install a new copy of Raspbian so you know you’re working from a good base image. Fortunately, you can use our new imaging utility, which makes installing a fresh copy of the operating system much easier.
Connecting a monitor, keyboard, and mouse
I normally use my Raspberry Pis headless as a server. But working from home, and using Raspberry Pi as your primary computer, you’re going to need a monitor, keyboard, and mouse.

My Raspberry Pi 4, which I use for video calls, perched on the edge of my desk at home
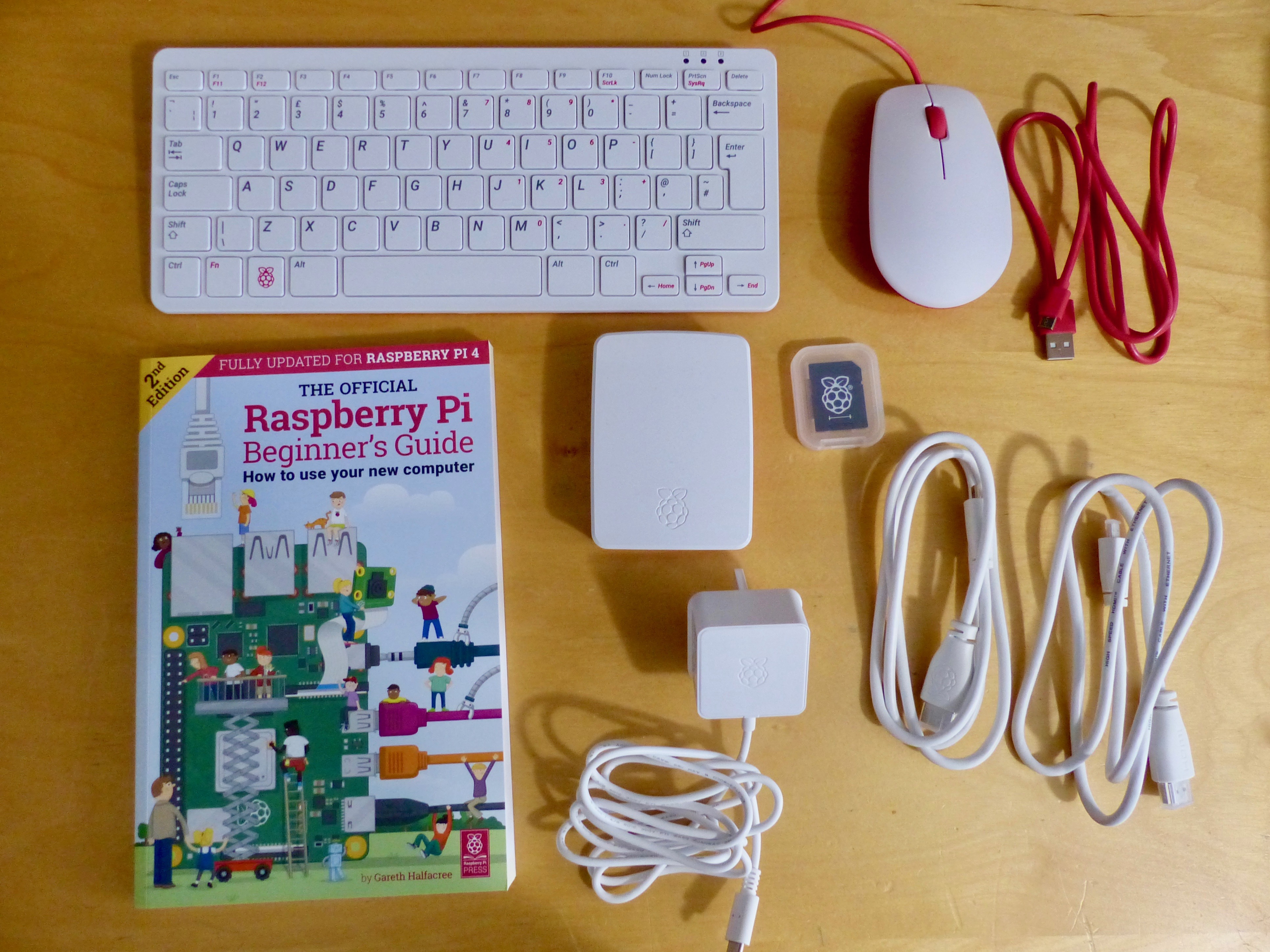
Except for the monitor, the Raspberry Pi Desktop Kit has everything you need to get you going, including a USB-C power supply and all the necessary cables.
Connecting a keyboard and a mouse to your Raspberry Pi just involves plugging them in, although you should probably make sure you plug them into the USB 2 rather than the USB 3 sockets. You can tell these apart by their colour: USB 3 sockets have blue ‘tongues’, while USB 2 sockets have black ones.